Charlie Duke's Left EV (Extravehicular) Glove
Photographed at the
National Air and Space Museum's Garber Facility
in July 2004 by Ulrich Lotzmann
under the guidance of Amanda Young and Bill Ayrey.
Last revised 28 June 2008.

Charlie's Glove displayed by Amanda Young.
Ulli Lotzmann calls attention to the white bead of silicon around the bottom of each of the blue finger tips. This feature was added to the Apollo 16 and Apollo 17 EVA gloves for dust protection.
The following is an extract from the Apollo Operation Handbook: Extravehicular Mobility Unit, March 1971, Vol. I, System Description ( 4.6 Mb PDF ). We start with the IV (Intravehicular) glove, which, with modifications, served as the inner portion of the EV (Extravehicular) glove.
2.3.1.5 - IV (Intravehicular) Pressure Glove Assembly
The pressure glove assembly (fig. 2-6, bottom left) is a flexible, gas-retaining device which locks to the torso limb suit by means of a quick-disconnect coupling (the wrist disconnect). The bladder assembly is dip molded from a hand cast of the individual's hand. The bladder is comprised of an inner restraint core of nylon tricot covered with a dipped rubber compound. The dexterity of the bladder is increased by built-in relief projections over the knuckle areas, and, to facilitate thumb extension, a gusset is provided in the thumb/forefinger crotch.
A standard convolute section is incorporated in the wrist area of the bladder to allow omnidirectional movement of the wrist. The convoluted section is restrained by a nyion restraint fabric layer and a system of sliding cables secured to a wrist restraint ring and the glove side-wrist disconnect. The cable restraint system accepts the axial load across the glove convolute.
The glove side-wrist disconnect is the male portion of the wrist disconnect assembly and features a sealed bearing which permits 360 degree glove rotation.
The fingerless glove/outer convolute cover is a restraint assembly which is cemented onto the bladder at the wrist area and encloses the entire hand and wrist exclusive of the fingers and thumb. An external palm restraint assembly minimizes the ballooning effect when pressurized, thereby enhancing grip control. The convolute covers protect the bladder and convolute restraint system.
2.3.1.6 - EV Pressure Gloves
The EV glove assembly (fig. 2-6, top left) is a protective hand covering interfaced with the torso limb suit assembly prior to egress for extravehicular operations. The EV glove consists of a modified IV pressure glove assembly covered by the EV glove shell assembly. The assembly covers the entire hand and has an integral cuff or gauntlet which extends the protective covering well above the wrist disconnect.
A lunar surface EVA checklist is attached to the EV glove gauntlet outer shell as a crew/mission requirement. The specific location, method of attachment, and orientation of the checklist on the glove gauntlet will be defined by the crewman to satisfy specific needs and mission objectives.
The EV glove thermal shell is a multilayered assembly ( Table 2-VI ) which provides scuff, abrasion, flame impingement, and thermal protection to the pressure glove and crewman.
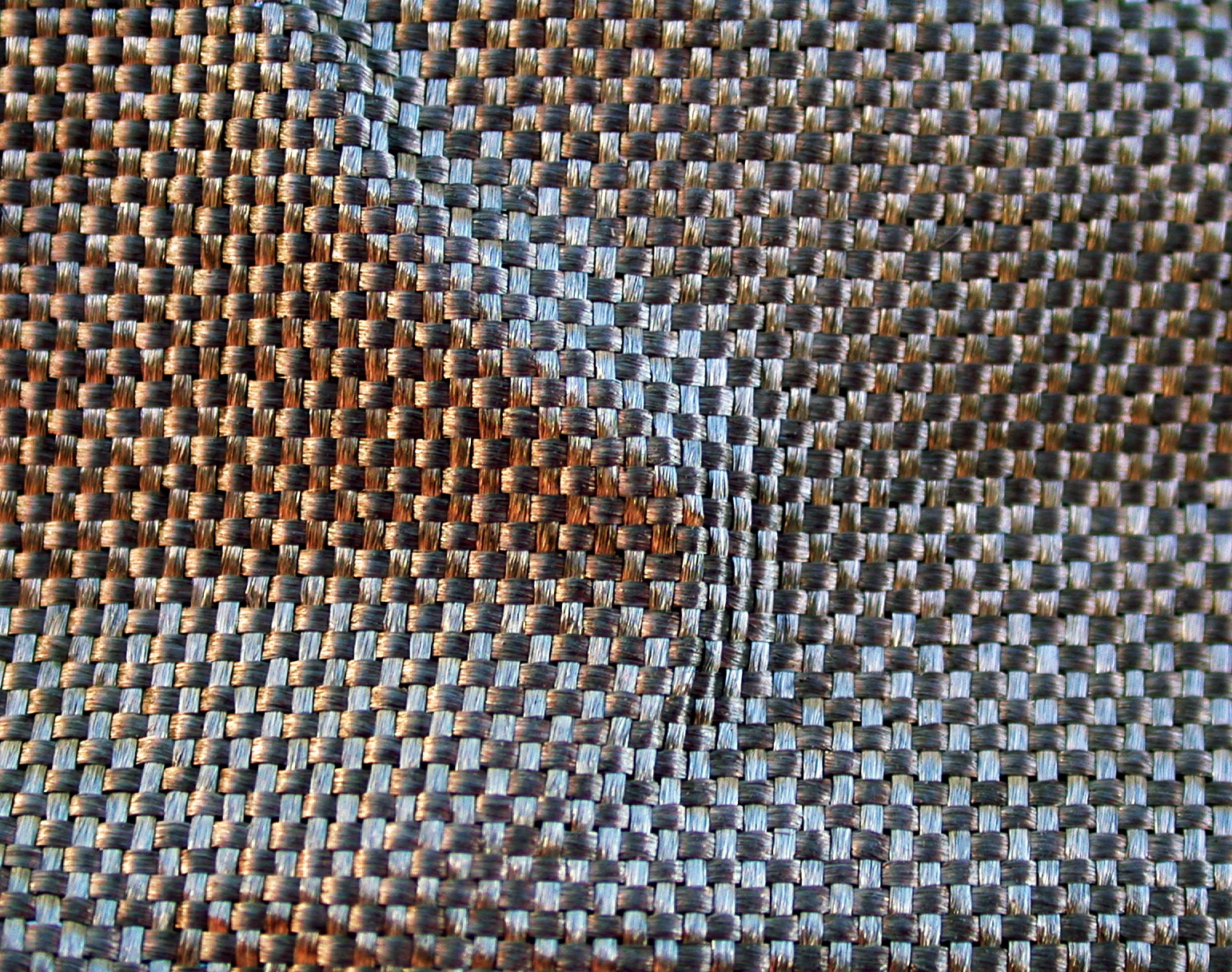
A woven metal (Chromel R) fabric is incorporated over
the hand area for added protection from abrasion.

Close-up of the Chromel-R layer on the palm of Charlie's glove.
Ulli Lotzmann describes the overall color as
"blueishgreenishgrey".
The thumb and finger shells are made of high-strength silicone rubber which is reinforced with nylon cloth and provides improved
tactility and strength. A silicone dispersion coating is applied to the palm, around the thumb, and to the inner side of each finger for increased gripping.
The outer cover is shaped to the inner pressure glove and does not appreciably restrict the dexterity of the inner pressure glove. A flap is sewn onto the back of the glove shell and provides access to the palm restraint flap. The flap is opened or closed by engaging or disengaging the hook-and-pile (Velcro) fastener tape. When the palm restraint flap and hook-and-pile tapes are disengaged, the glove shell can be removed by disengaging the cemented interfacing areas near the fingertips. The materials cross section of the cover layer of the EV glove assembly is identified in Table 2-VI.